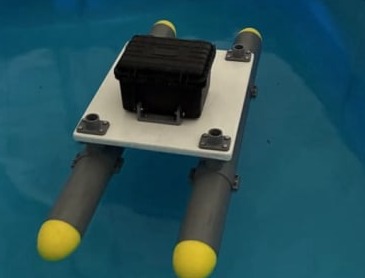
The project is an attempt to make a rover that enables my multibeam sonar to collect bathymetry data. The platform is equipped with low-cost gyro, accelerometer, magnetometer, and a GNSS RTK receiver paired with a local RTK base.
Conventional RC-components are used to handle the two thrusters made from bilge pumps. The pontoons are sewerpipes filled with Styrofoam and sealed with 3D printed endcaps. The linkages between pontoons and the bridgedeck are 3D printed and the bridgedeck is made from wet room panels(Vetpro), covered with fiberglass and epoxy.